Overview
For this research project, I helped design, build, and test robotic arms for the 1U TPODS modules being developed by Texas A&M's Land Air and Space Robotics (LASR) Laboratory for on-orbit satellite servicing. The project's aim was to stow dual 5DOF robotic arms compactly inside a 4" x 4" x 1" volume and deploy them out on orbit to help grapple the satellite being serviced.
During the spring 2024 semester, I worked on a team of 2 doing preliminary research and conceptual design for our robotic arms. Then, at the start of the summer, our team expanded to 4 members and we began detailed design.
As the one primarily responsible for electromechanical design of the arm, I started out with the most important aspect of the design - the actuators. I researched and compared specs sheets for motors and gears until I was able to find the components that best fit our torque, volume, and other requirements. This was done for the flight version (compact and high quality, but very expensive) as well as our prototype version (slightly larger and lower quality, but much cheaper).
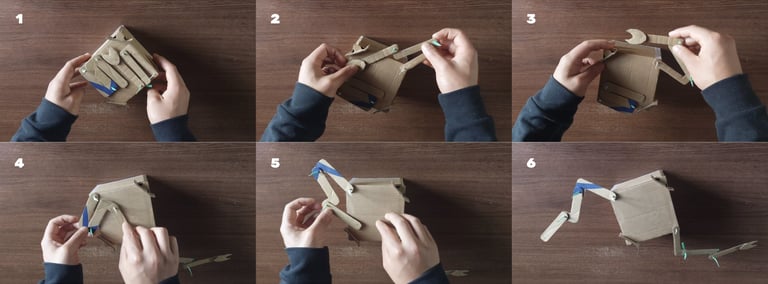
Using the selected actuators, I then went about designing the links and joints of the arm in SOLIDWORKS. This was a challenging task, as I had to make the arms compact enough to stow in the top of the TPODS module, while also devising a strategy for how they would deploy themselves out in space. The first problem I was able to solve by making the actuators themselves the bulk of the structure (with two motors in each of the first two links, and worm gears to obtain the desired joint rotations). For the second problem, I constructed a to-scale mockup of the TPODS module out of cardboard and used that to come up with an effective deployment strategy for both arms.
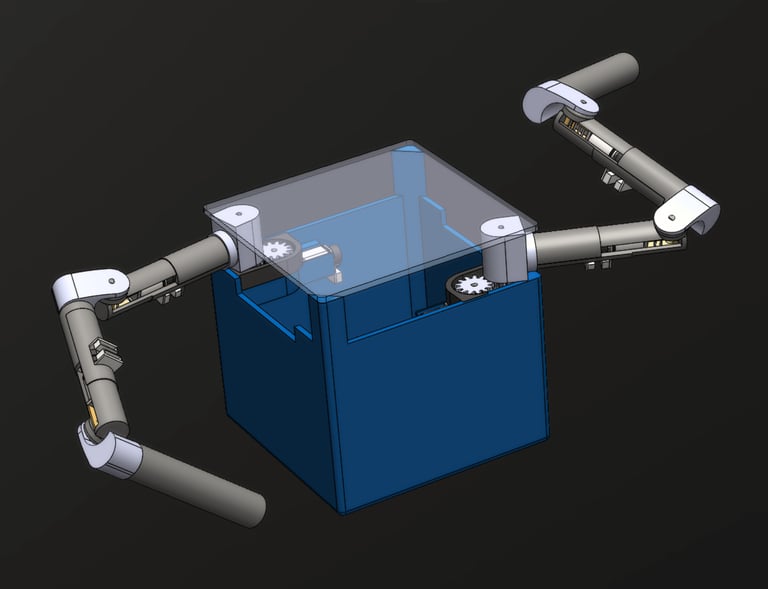
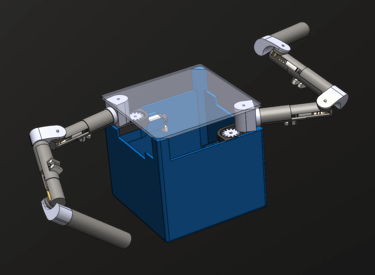
CAD mockup of prototype arms that I created in SolidWorks
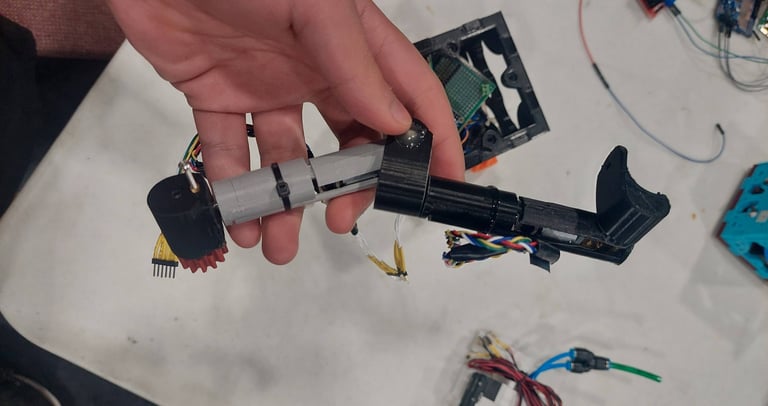
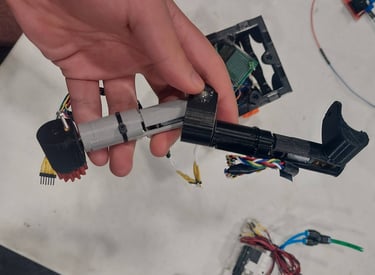
3D-printed prototype arm that I designed